Difference between revisions of "project09:Final Presentation"
| (60 intermediate revisions by one user not shown) | |||
| Line 1: | Line 1: | ||
__NOTITLE__ __NOTOC__ | __NOTITLE__ __NOTOC__ | ||
| + | <html> | ||
| + | |||
| + | <head> | ||
| + | </head> | ||
| + | <style> | ||
| + | h2 {font-style: "semi-bold"; text-align: "center";} | ||
| + | div#presentation {width: 100%;} | ||
| + | #presentation img, video {width: 100%; | ||
| + | margin:1%;} | ||
| + | </style> | ||
| + | <body> | ||
| + | |||
| + | <div > | ||
| + | <video muted preload="auto" autoplay loop width="850"> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235725&authkey=AIjkH48Y463fn4s" type="video/mp4"> | ||
| + | </video> | ||
| + | </div> | ||
| − | |||
<div style="height:30px; width: 850px; margin:0px; padding: 0px; padding-top: 20px; border: 0px;"> | <div style="height:30px; width: 850px; margin:0px; padding: 0px; padding-top: 20px; border: 0px;"> | ||
<div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | ||
| − | + | <p><a href="/index.php/project09:Main" title="project09:Main"><b>Main</b></a> | |
| + | </p> | ||
</div> | </div> | ||
| − | |||
<div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | ||
| − | + | <p><a href="/index.php/project09:Presentations" title="project09:Presentations"><b>Project</b></a> | |
| + | </p> | ||
</div> | </div> | ||
| − | |||
<div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | ||
| − | + | <p><a href="/index.php/project09:Workshops" title="project09:Workshops"><b>Workshops</b></a> | |
| + | </p> | ||
</div> | </div> | ||
| − | |||
<div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | ||
| − | + | <p><a href="/index.php/project09:Prototyping" title="project09:Prototyping"><b>Prototyping</b></a> | |
| + | </p> | ||
</div> | </div> | ||
| − | |||
<div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | <div style="float:left; width: 158px; height 30px; border: 1px solid #aaa; margin-right:10px; margin-bottom:10px;" align="center"> | ||
| − | + | <p><strong class="selflink"><b>Final Presentation</b></strong> | |
| + | </p> | ||
</div> | </div> | ||
| − | |||
</div> | </div> | ||
| + | |||
<br> | <br> | ||
| + | <div id="project"> | ||
| + | <div id="abstract"> | ||
| + | <h2>Abstract</h2> | ||
| + | <p> | ||
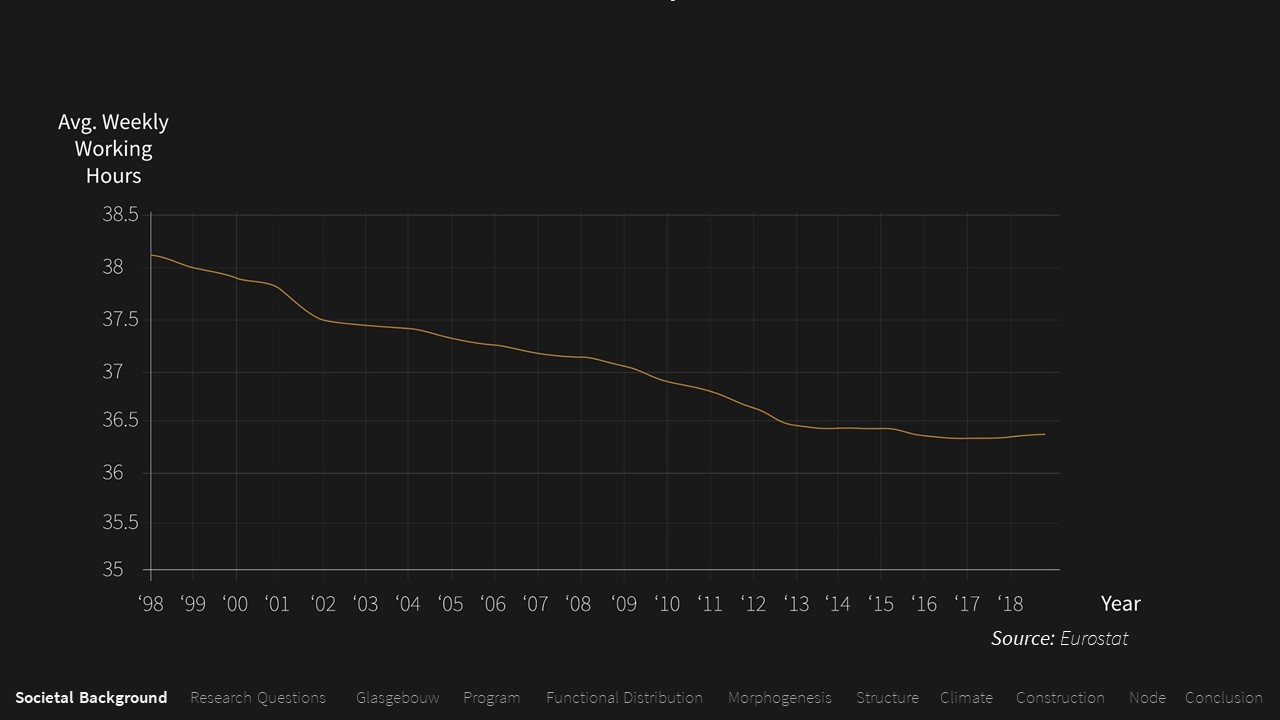
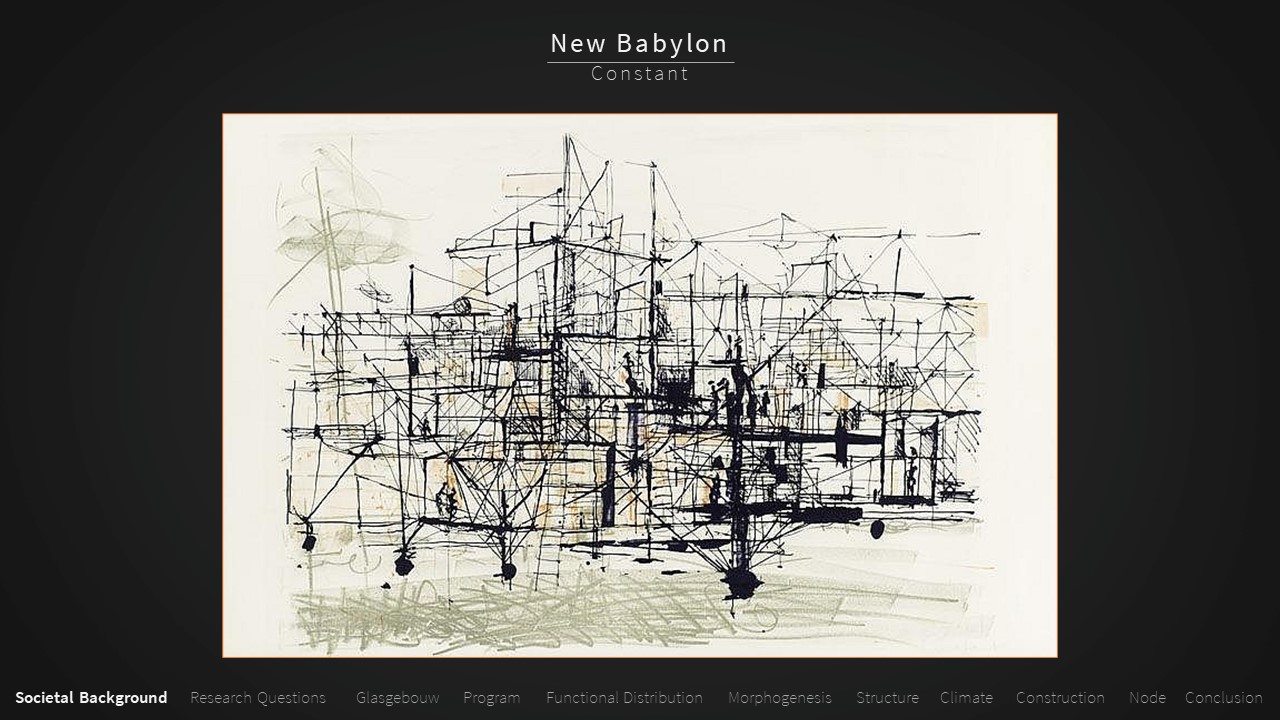
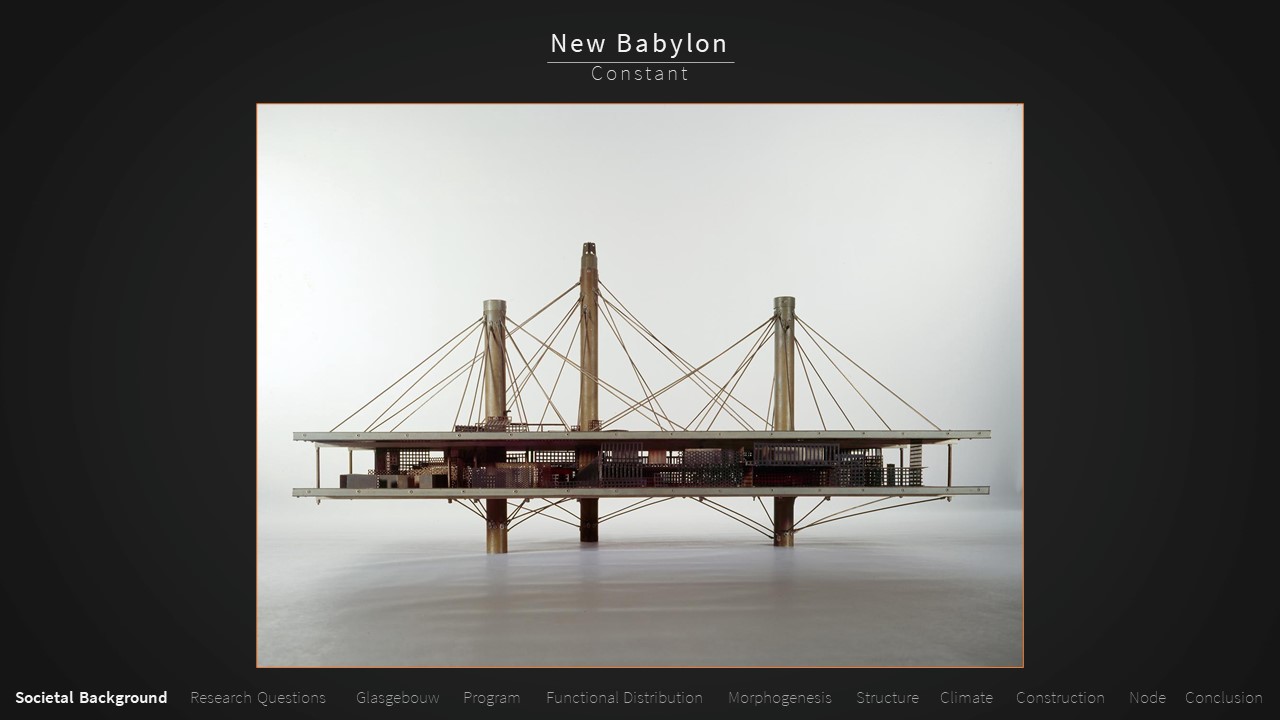
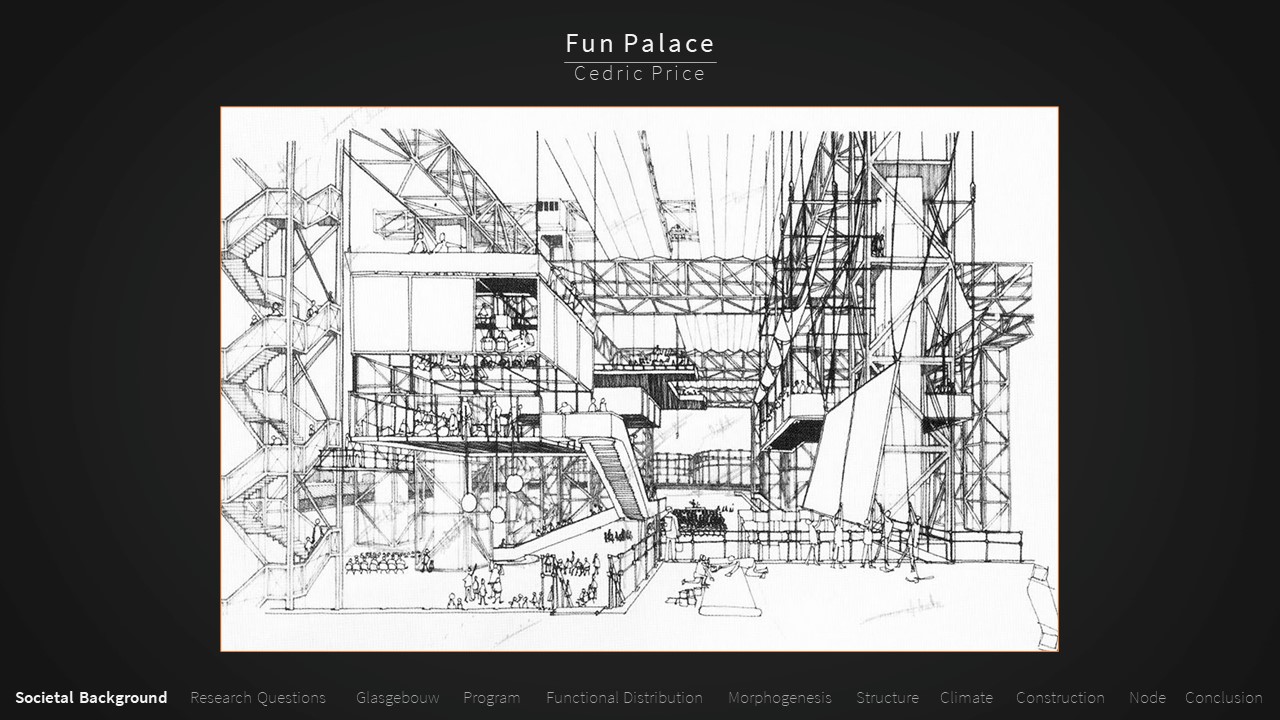
| + | The average weekly working hours within the European Union has been decreasing very steadily over the last decades, as a result of the automatization of the economy. This seems to suggest a disappearance of the necessity to work. In his New Babylon project, Constant Nieuwenhuizen has imagined a society in which the inhabitants, the Homo Ludens, are completely free of any occupational obligations. How can an architectural intervention transform an existing building in order to integrate in such new kind of society? | ||
| + | <br> | ||
| + | This design question was accompanied by a research that emerged from a personal fascination. The question from this perspective was: How can certain natural processes be abstracted and translated in simple rules in order to use them in computational tools in the design process? | ||
| + | <br> | ||
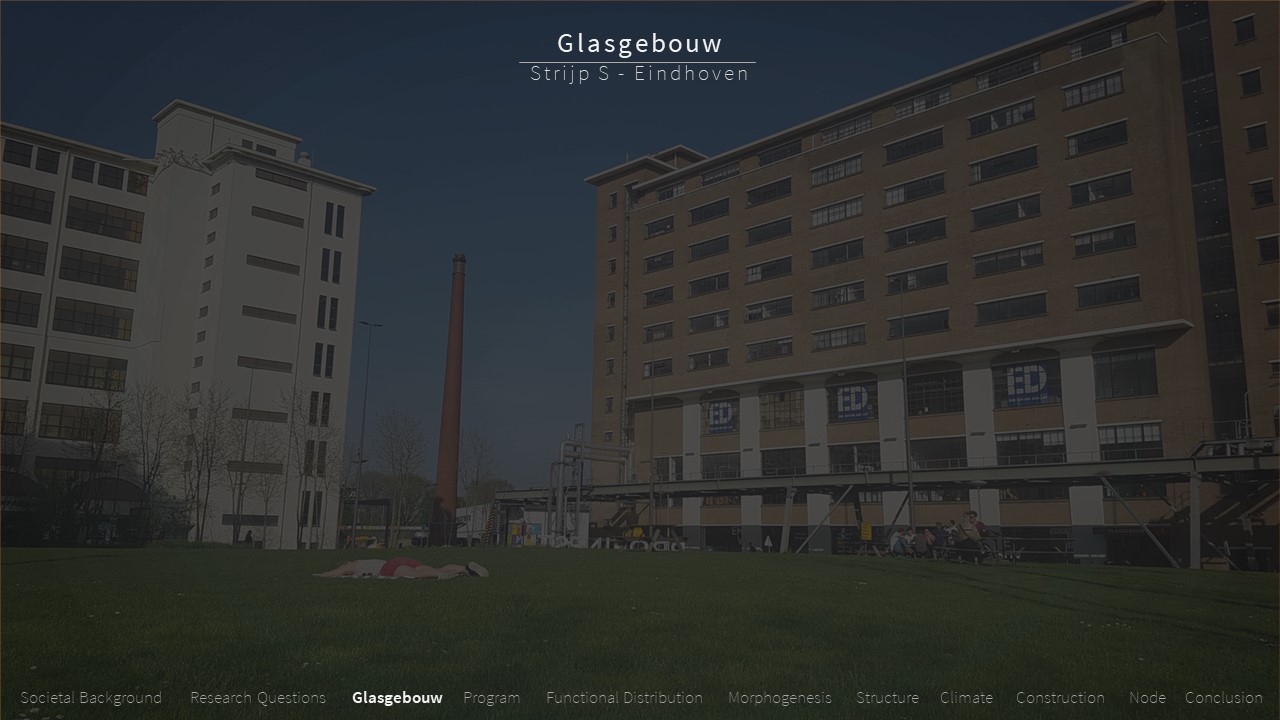
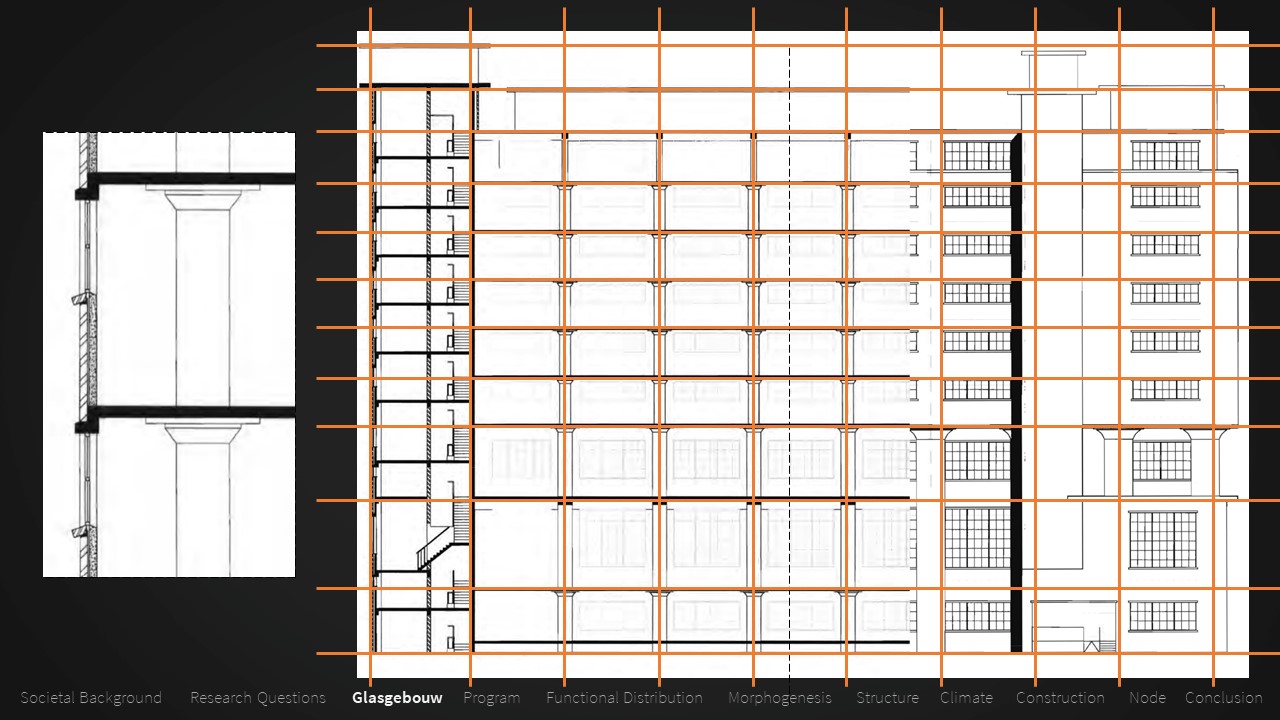
| + | An intervention in an remnant from an industrial era has been designed in order to suit this new kind of society. The intervention creates a new route through the building, the floors of the existing parts contain the program. This program aims to provide technological additive manufacturing tools and render them accessible to a wider public. It strives so by providing interactive user interfaces and human-robot collaborations. | ||
| + | <br> | ||
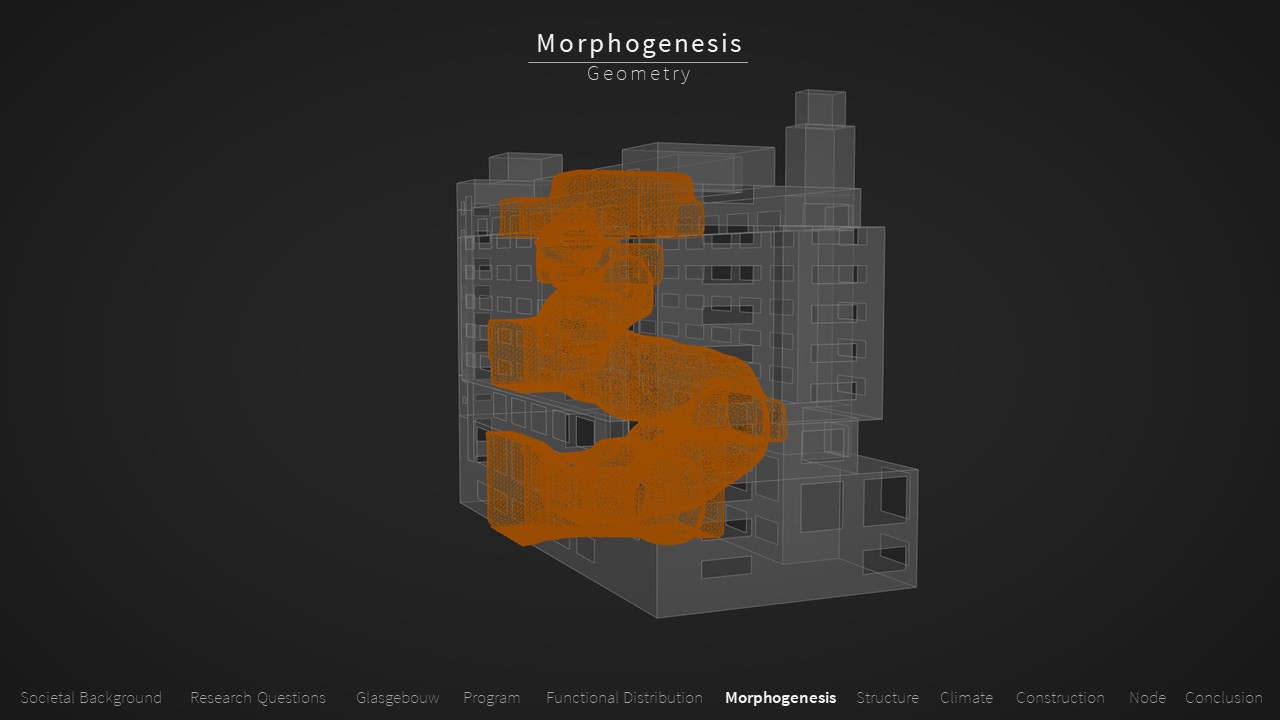
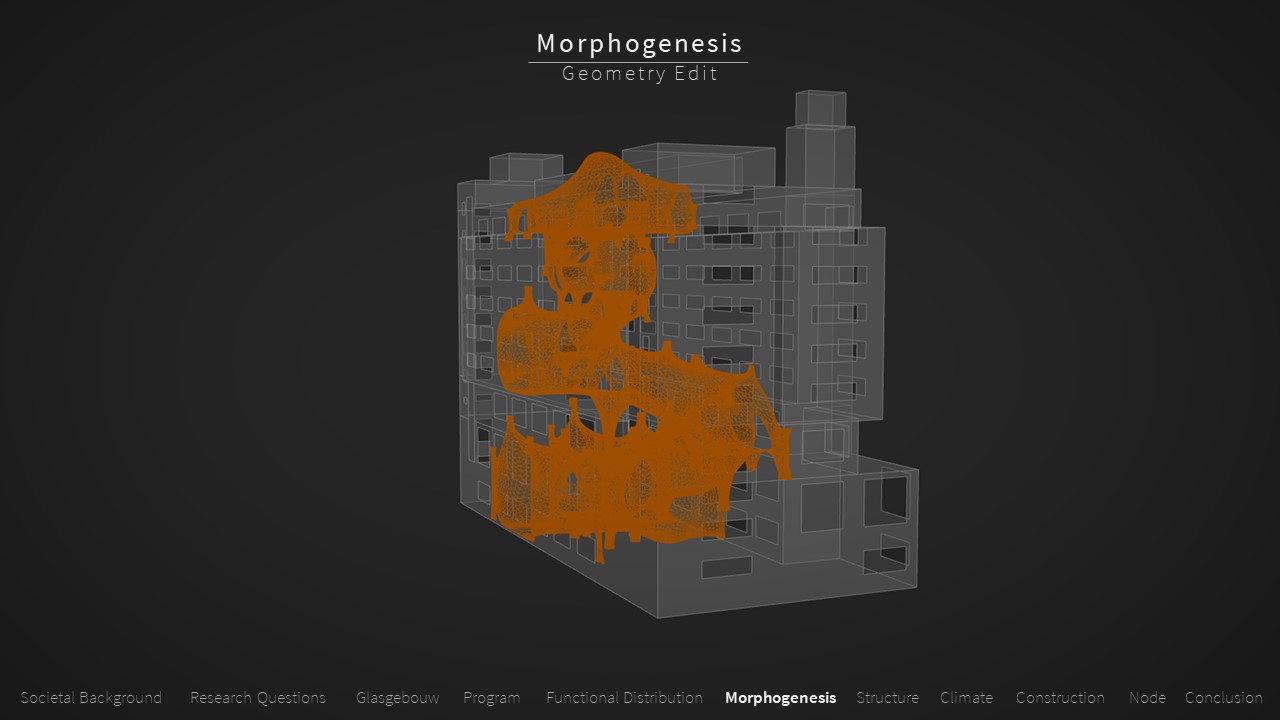
| + | The intervention has been developed in close relation to the research. The computational tools created in the research have been used to design the structure. First a main volume was created which determines the composition of the atria as well as the structure. Structural analysis was applied to inform the composition and thickness of the beams. Consecutively, analysis of the utilization of these beams is used to inform its cross sections. Details as railing and balustrades are the design with the aim to extend the emerged architectural language. | ||
| + | <br> | ||
| + | Because of the close relation with the research in natural processes certain art-nouveau characteristics emerged in the architectural language of the intervention. However, rather than merely decorative, they are informed, performative and functional. The emerged architectural language therefore may be referred to as ‘informed art-nouveau’. | ||
| + | <br> | ||
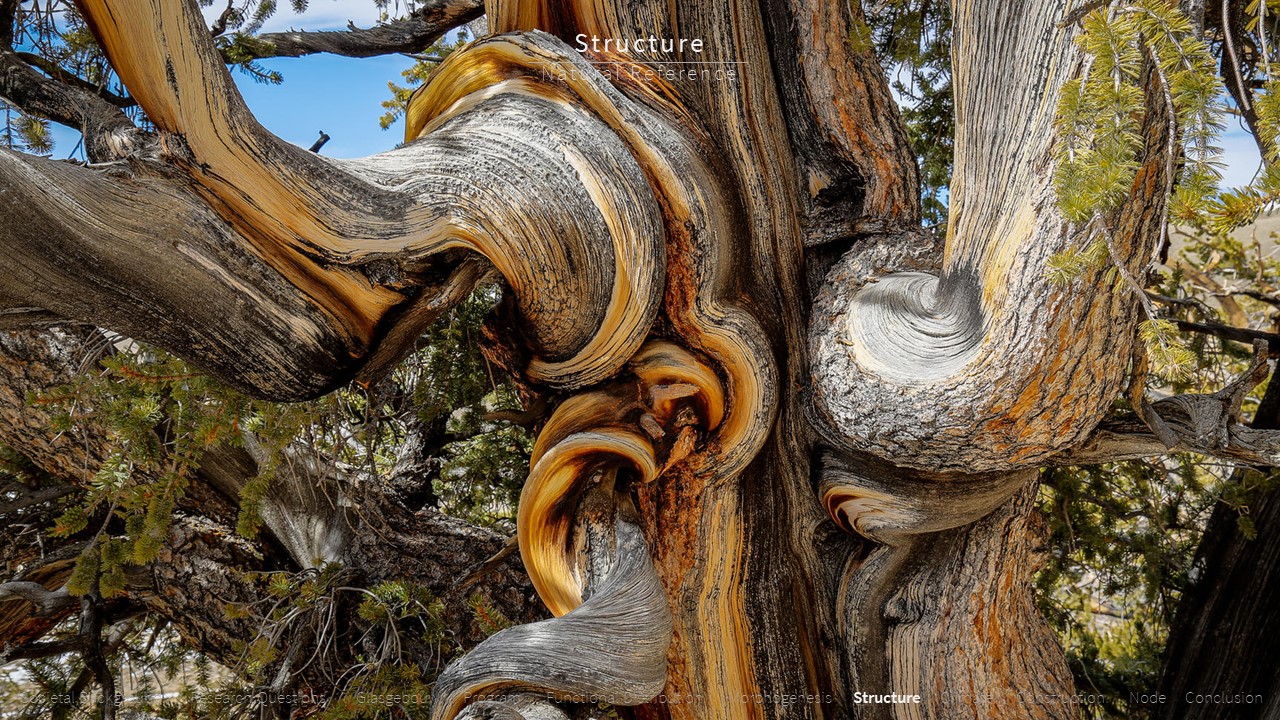
| + | The research concludes that it’s important to acknowledge the complexity of natural processes and that they are always a part of a larger entangled system. Therefore, in order to use a natural reference in the development of computational tools it is essential to abstract an aspect that seems relevant for the project, which than needs to be translated, adjusted, and complemented in simple rules. By doing so the natural processes become merely inspirational in the architectural design. Yet they have been fundamental in the development of this project, which is evident in the emerged architectural language. | ||
| + | <br> | ||
| + | <br> | ||
| + | <br> | ||
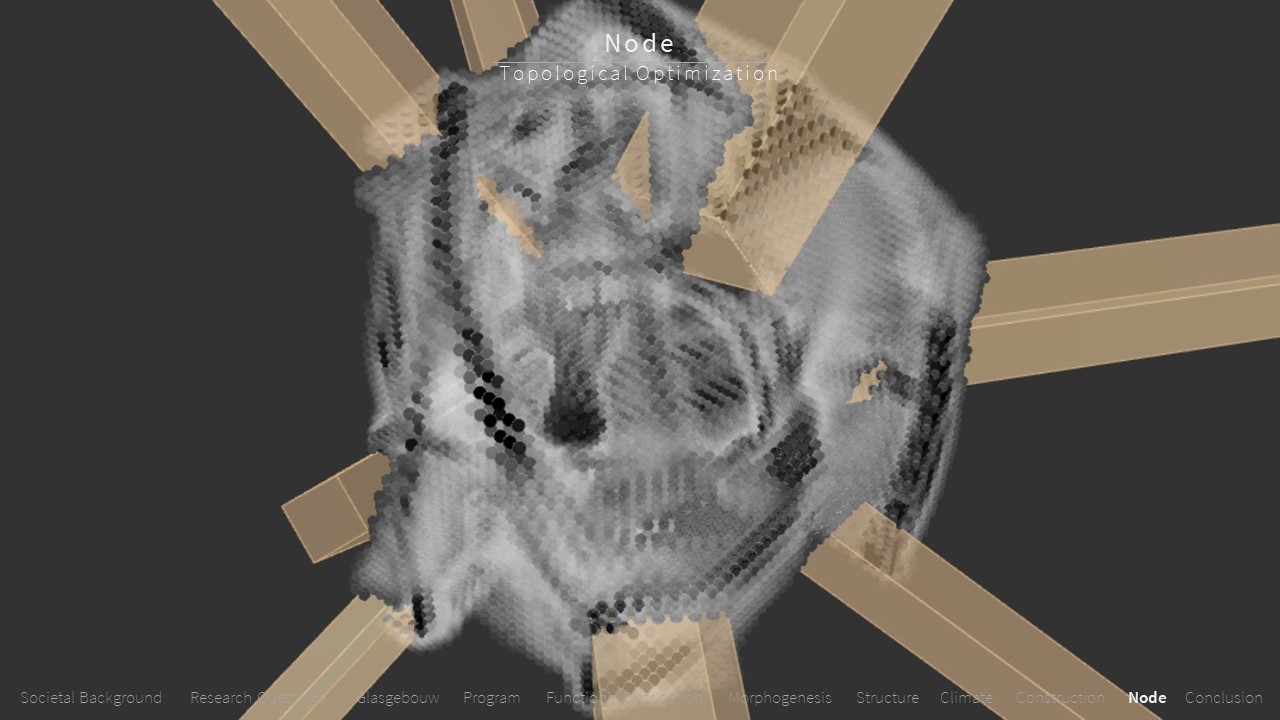
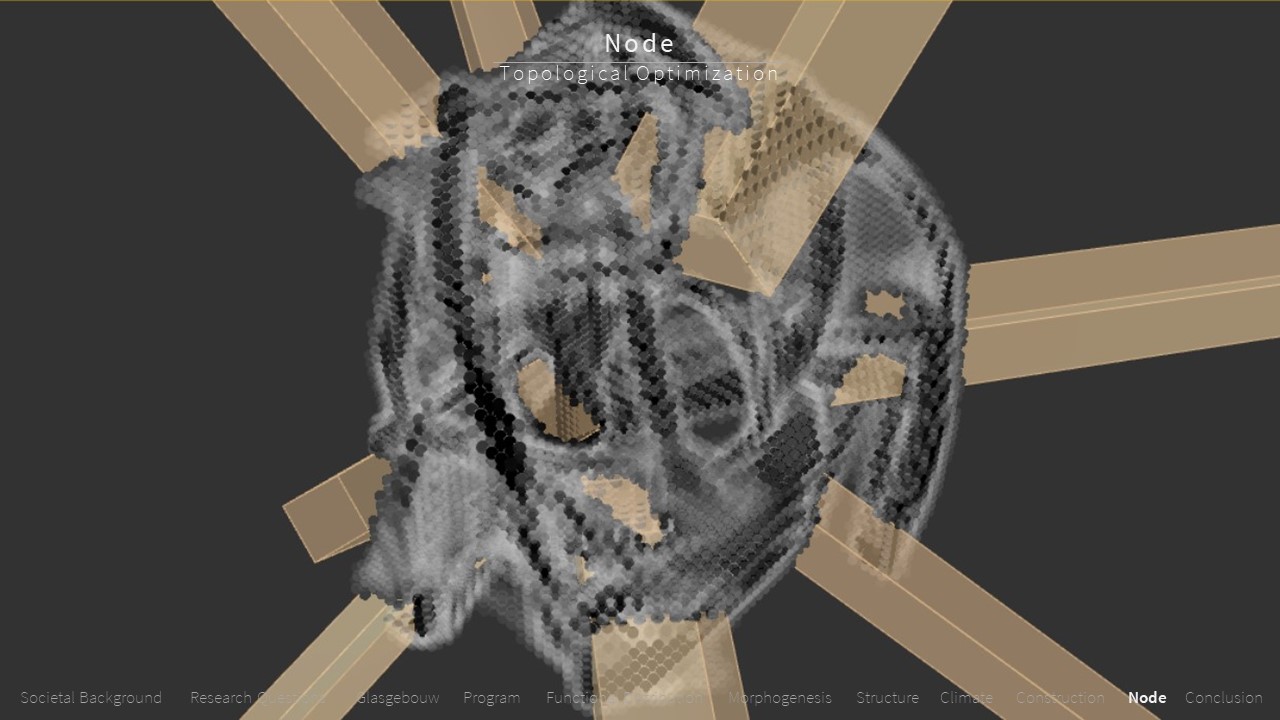
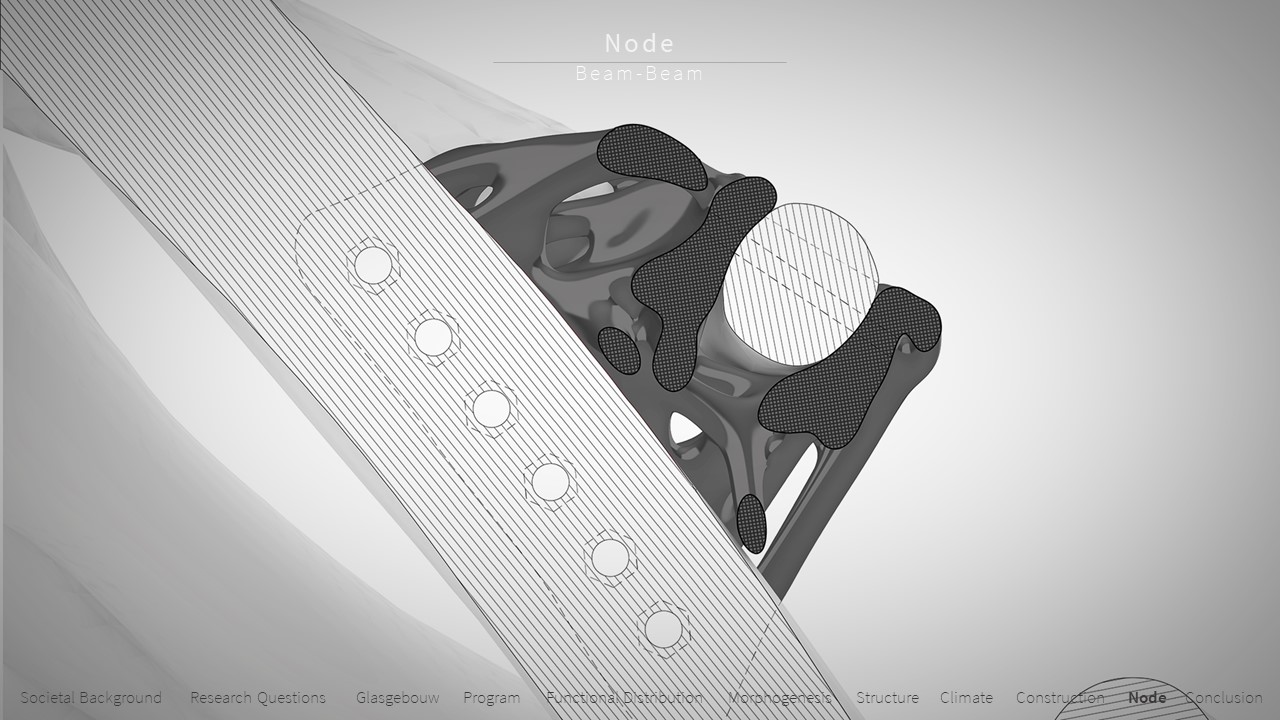
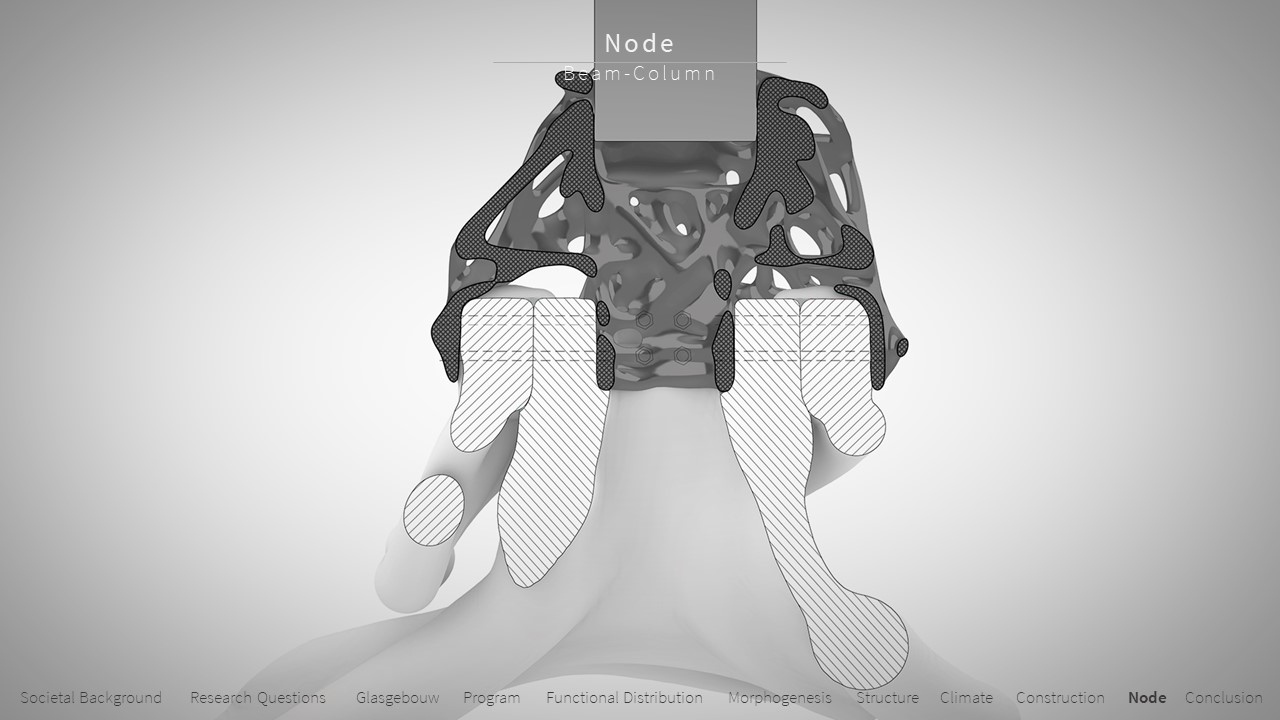
| + | In a workshop during the project a structural node was developed. After this workshop this was continued. The steel node mutually connects the beams of the wooden structure, as well as the beams with the columns of the existing structure. The development of the node became a project on itself with the aim of prototyping 1:1 by means of 3D printing in steel. It is a project still in progress, of which the development can be followed <a href="/index.php/project09:Prototyping" title="project09:Prototyping">here</a>. | ||
| + | |||
| + | </p> | ||
| + | </div> | ||
| − | < | + | <div id="presentation"> |
| − | + | <h2>Presentation</h2> | |
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | + | ||
| − | </ | + | |
| − | + | ||
| − | + | ||
<img src="http://100ybp.roboticbuilding.eu/images/b/be/P5_%281%29.JPG"> | <img src="http://100ybp.roboticbuilding.eu/images/b/be/P5_%281%29.JPG"> | ||
<br> | <br> | ||
| Line 45: | Line 75: | ||
<img src="http://100ybp.roboticbuilding.eu/images/9/9d/P5_%283%29.JPG"> | <img src="http://100ybp.roboticbuilding.eu/images/9/9d/P5_%283%29.JPG"> | ||
<br> | <br> | ||
| − | </ | + | <img src="http://100ybp.roboticbuilding.eu/images/3/33/P5_%284%29.JPG"> |
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/a/a7/P5_%285%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/e/ed/P5_%286%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/3/39/P5_%287%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/3/35/P5_%288%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/1/1b/P5_%289%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/4/49/P5_%2810%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/f/f0/P5_%2811%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/4/40/P5_%2812%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/2/27/P5_%2813%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/5/5a/P5_%2814%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/9/9f/P5_%2815%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/f/f6/P5_%2816%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/5/59/P5_%2817%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235674&authkey=ABxSISkbBYkcADY" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235675&authkey=AGqDMsBiREtbLk0" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/3/3f/P5_%2820%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235676&authkey=ABV63aRoSETvq4k" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/4/41/P5_%2822%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235677&authkey=AFdvV2COM9hlVUU" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235678&authkey=ABSXLnMys2xo2uQ" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/5/5d/P5_%2825%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/e/e4/P5_%2826%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235679&authkey=AIi4vr8Mz_7rwpo" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235680&authkey=AJSufUKSS_fjyiA" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235681&authkey=AMc_99OVbUKkMbE" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235682&authkey=AG8ZP9vKucnUF1M" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235683&authkey=AEdjp_ur69lI6XY" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235684&authkey=AOD1-1YG6-E3Rs0" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/d/d4/P5_%2833%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/c/c9/P5_%2834%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/e/e1/P5_%2835%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/a/a8/P5_%2836%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/d/dc/P5_%2837%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/e/e4/P5_%2838%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/9/9b/P5_%2839%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/0/00/P5_%2840%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235685&authkey=AGcVJGcT-WSAZnc" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235686&authkey=ANw6UEyXWJ7Rl8A" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/7/75/P5_%2843%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235687&authkey=AIWAMKLz3KSiD4k" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235688&authkey=AJYD5X4RAD37nBE" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/c/c7/P5_%2846%29.JPG"> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235689&authkey=AHVb846P05f4Ahc" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235689&authkey=AHVb846P05f4Ahc" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235690&authkey=APK8VBh7enEBrOU" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235691&authkey=ABRhzV0Ff7r4j9k" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/6/6d/P5_%2850%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/e/e1/P5_%2851%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235692&authkey=AOFgR6GzMujzQ4Y" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235693&authkey=AOMf1Rmj22Hxu-g" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/1/1e/P5_%2854%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235694&authkey=ANGqfRg8amc_86s" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/d/d5/P5_%2856%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235695&authkey=AHRMQHnMRSdusNM" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235696&authkey=ADgx94jFbV-oa94" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235697&authkey=AIqA_hnId2DtTqk" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/9/9f/P5_%2860%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235698&authkey=AL7oK-B2E9VlWQ" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/3/38/P5_%2862%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/d/d1/P5_%2863%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/d/d9/P5_%2864%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/1/18/P5_%2865%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/7/70/P5_%2866%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235699&authkey=AC1Fl9mAz5Nskfo" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/e/e6/P5_%2868%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/c/c1/P5_%2869%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/1/1f/P5_%2870%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/9/97/P5_%2871%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235700&authkey=AFsieFElks5YLqA" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/9/91/P5_%2873%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235701&authkey=AGZD6_52dJ5DCIs" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235702&authkey=ALKYOJLn4B1SB7U" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235703&authkey=AI_M948sZn8YiC8" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235704&authkey=ANg5a1xkcrWln4o" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235705&authkey=AKa7GpkbD9_jnXo" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/0/0b/P5_%2879%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/f/f9/P5_%2880%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/5/5c/P5_%2881%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/3/3c/P5_%2882%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/e/ed/P5_%2883%29.JPG"> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/0/02/P5_%2884%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235706&authkey=AIIJ2vxUCsNJR2" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235707&authkey=AAJLqMGM6HENcSw" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235708&authkey=AAqGQytoU9AOyRU" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/3/38/P5_%2888%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235709&authkey=AH8amd-DB0Zt06o" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/3/38/P5_%2890%29.JPG"> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235710&authkey=AIAHe8G5L_GWkVk" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235712&authkey=AAliYyvdLDES000" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235711&authkey=AGGbQK3G3G7q5l4" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235713&authkey=AHQEkpgtceEJbls" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235713&authkey=AHQEkpgtceEJbls" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235714&authkey=ADEudp8pfE7NKjI" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235715&authkey=ANH7IsbhSF1y_Dc" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235716&authkey=AA24npjwKKCiX1E" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235717&authkey=AG0w-B7rij3U71U" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235718&authkey=AJxtVoeFvuDm62" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <video preload="none" controls> | ||
| + | <source src="https://onedrive.live.com/download?cid=40A9C0850F2A879D&resid=40A9C0850F2A879D%21235719&authkey=ALphaHKXmv0g4Dk" type="video/mp4"> | ||
| + | </video> | ||
| + | <br> | ||
| + | <img src="http://100ybp.roboticbuilding.eu/images/9/9f/P5_%28101%29.JPG"> | ||
| + | <br> | ||
| + | </div> | ||
| + | </div> | ||
| + | </body> | ||
</html> | </html> | ||
Latest revision as of 15:36, 16 June 2020
Abstract
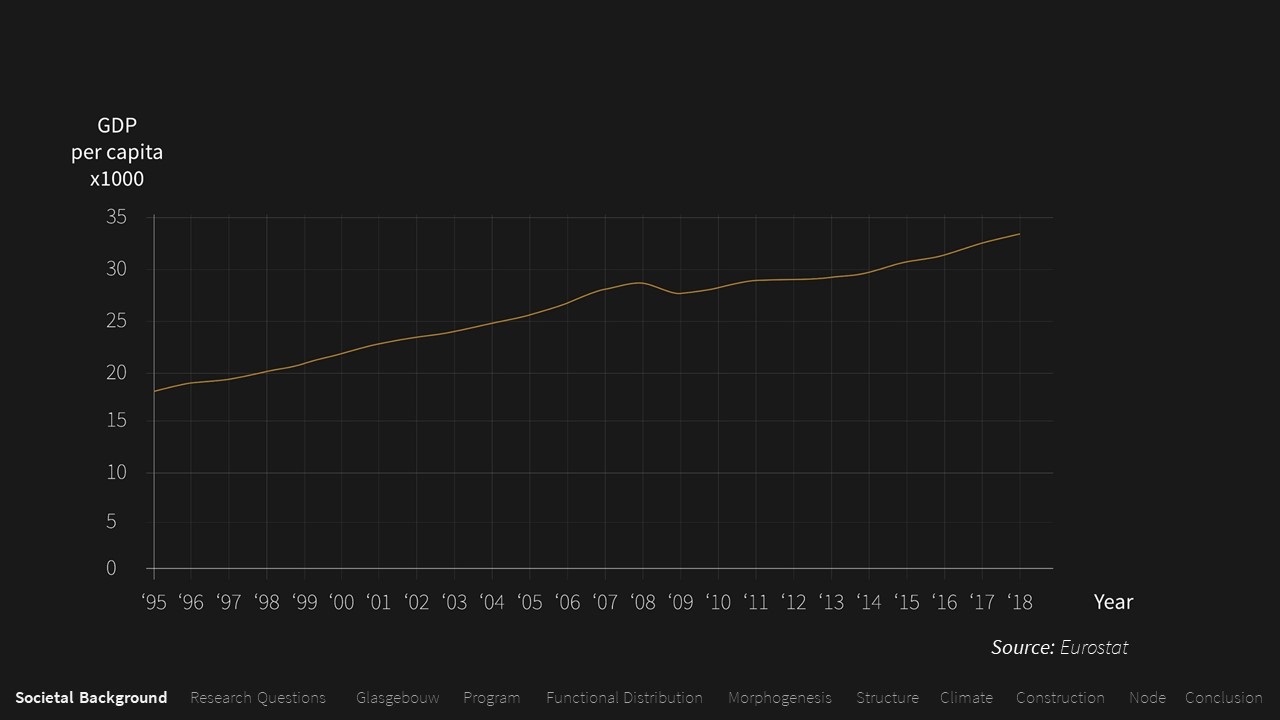
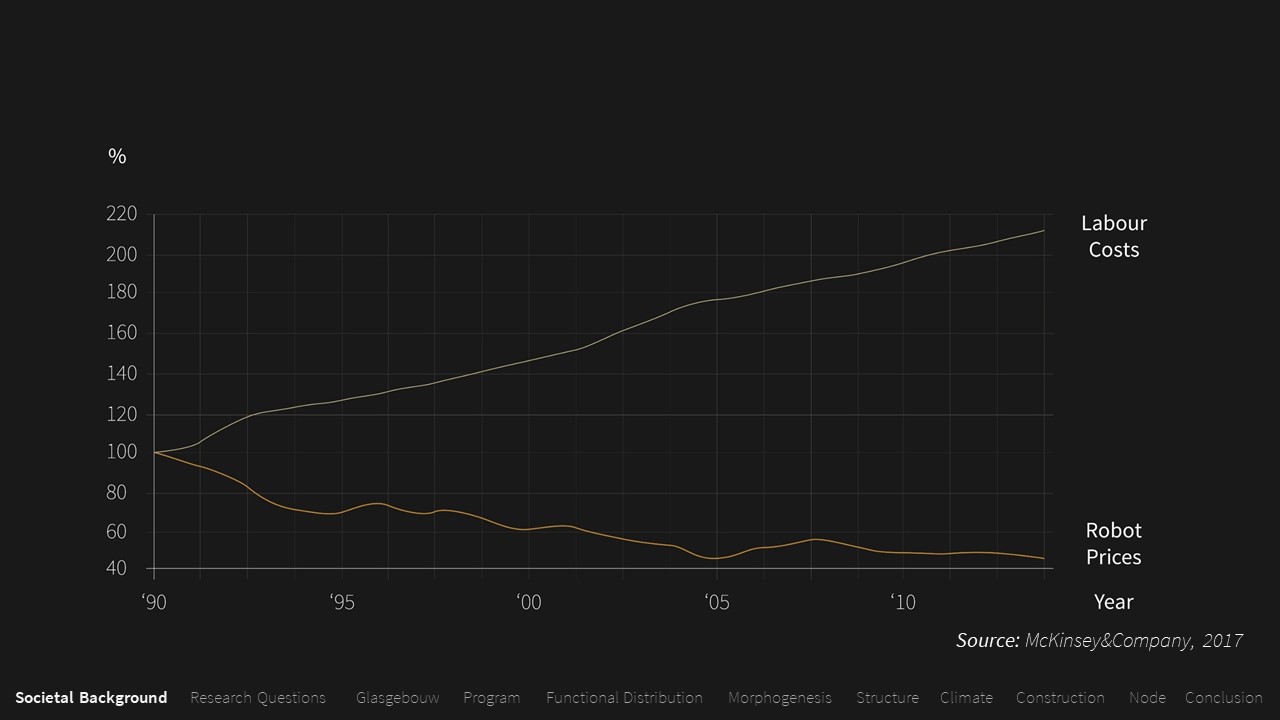
The average weekly working hours within the European Union has been decreasing very steadily over the last decades, as a result of the automatization of the economy. This seems to suggest a disappearance of the necessity to work. In his New Babylon project, Constant Nieuwenhuizen has imagined a society in which the inhabitants, the Homo Ludens, are completely free of any occupational obligations. How can an architectural intervention transform an existing building in order to integrate in such new kind of society?
This design question was accompanied by a research that emerged from a personal fascination. The question from this perspective was: How can certain natural processes be abstracted and translated in simple rules in order to use them in computational tools in the design process?
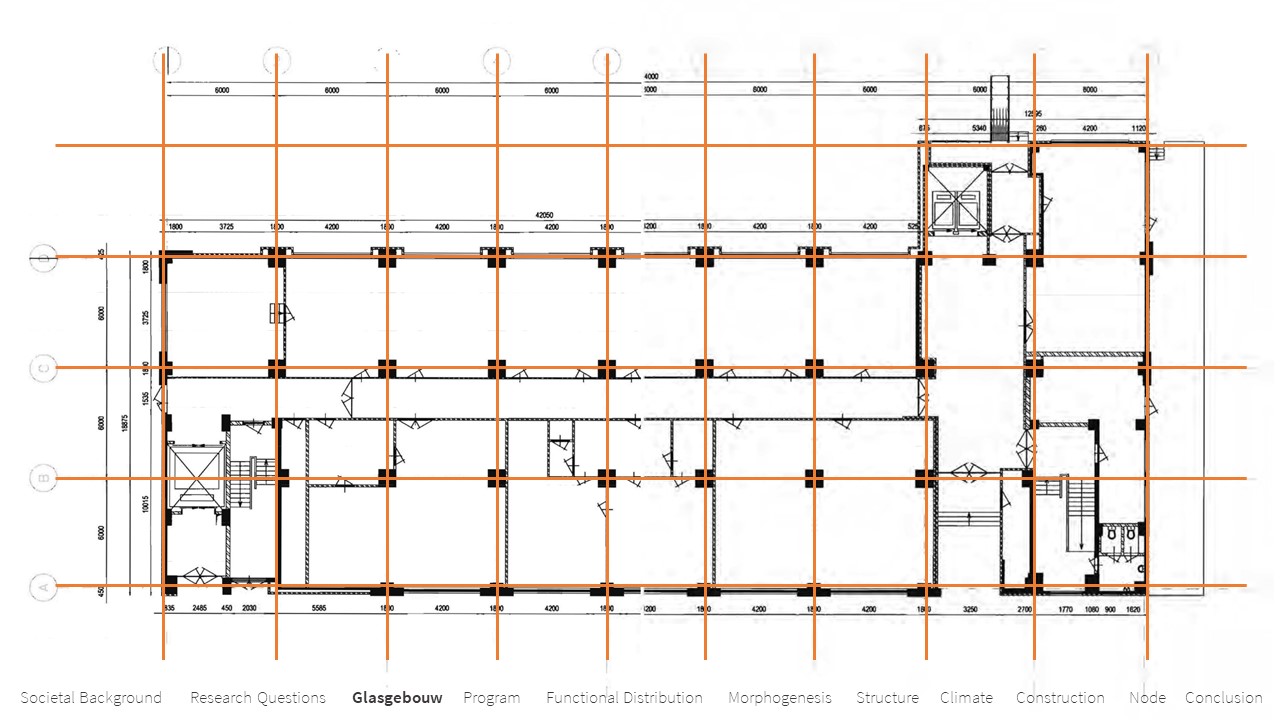
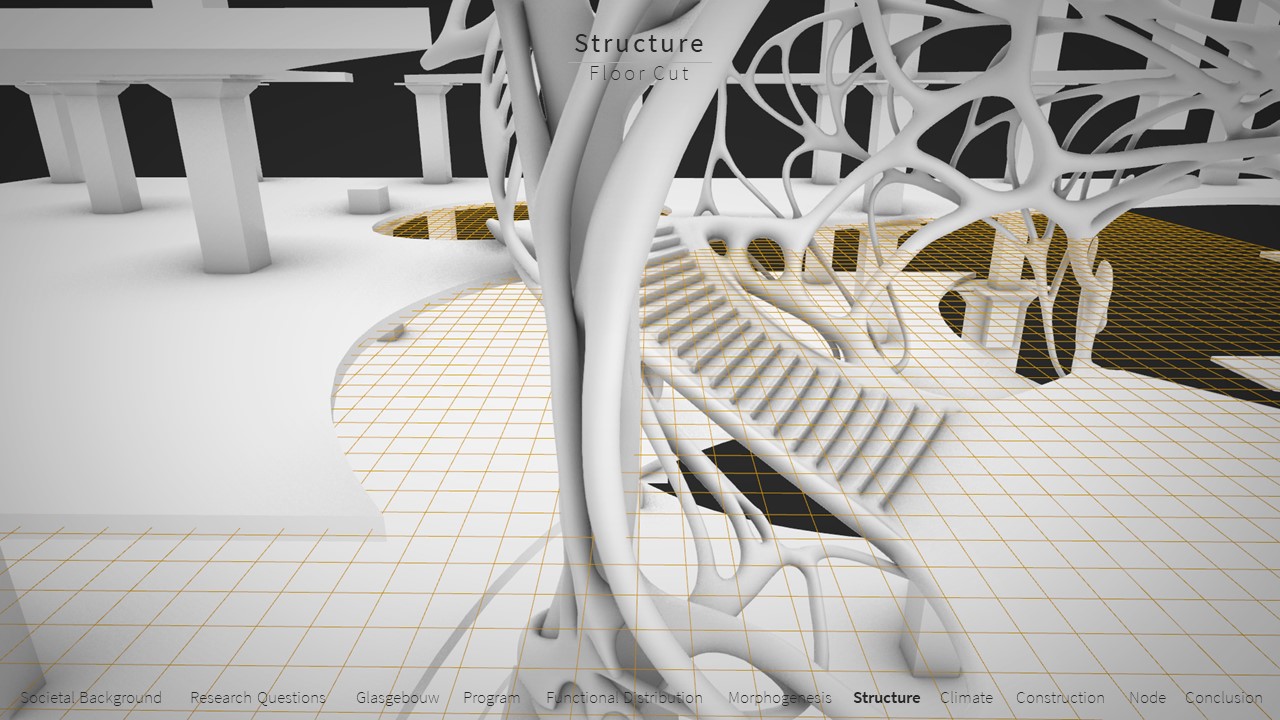
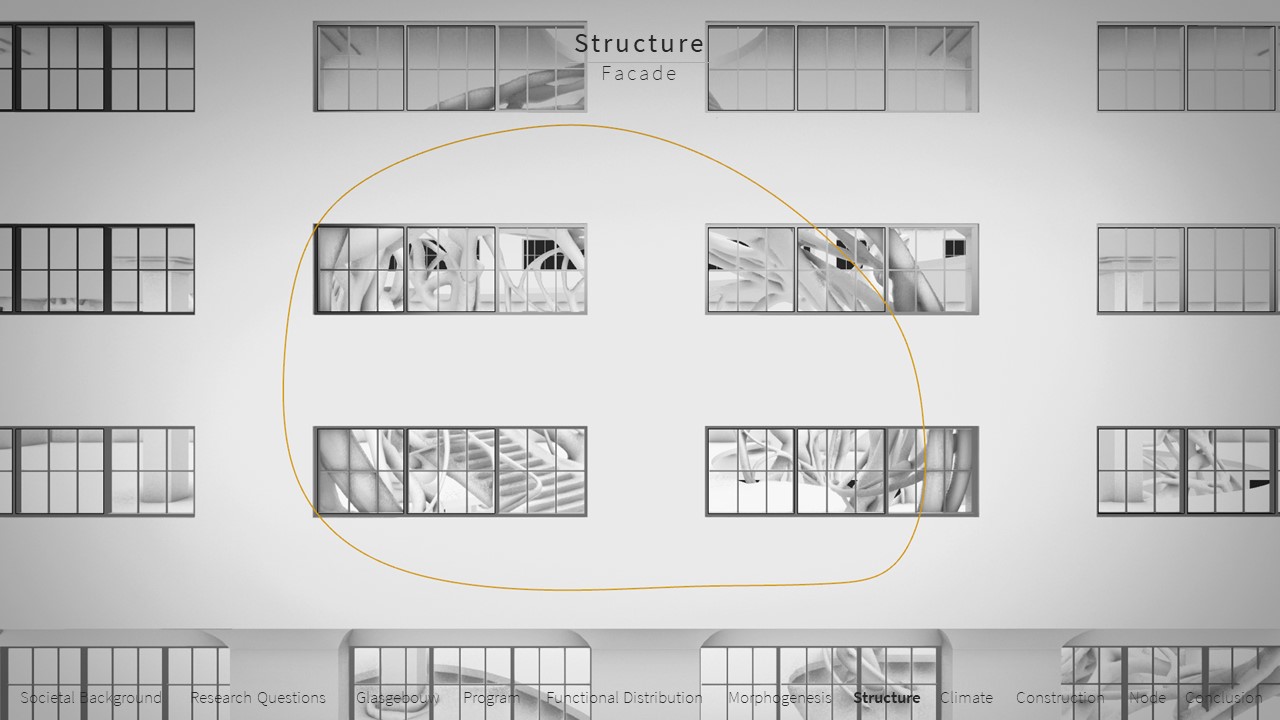
An intervention in an remnant from an industrial era has been designed in order to suit this new kind of society. The intervention creates a new route through the building, the floors of the existing parts contain the program. This program aims to provide technological additive manufacturing tools and render them accessible to a wider public. It strives so by providing interactive user interfaces and human-robot collaborations.
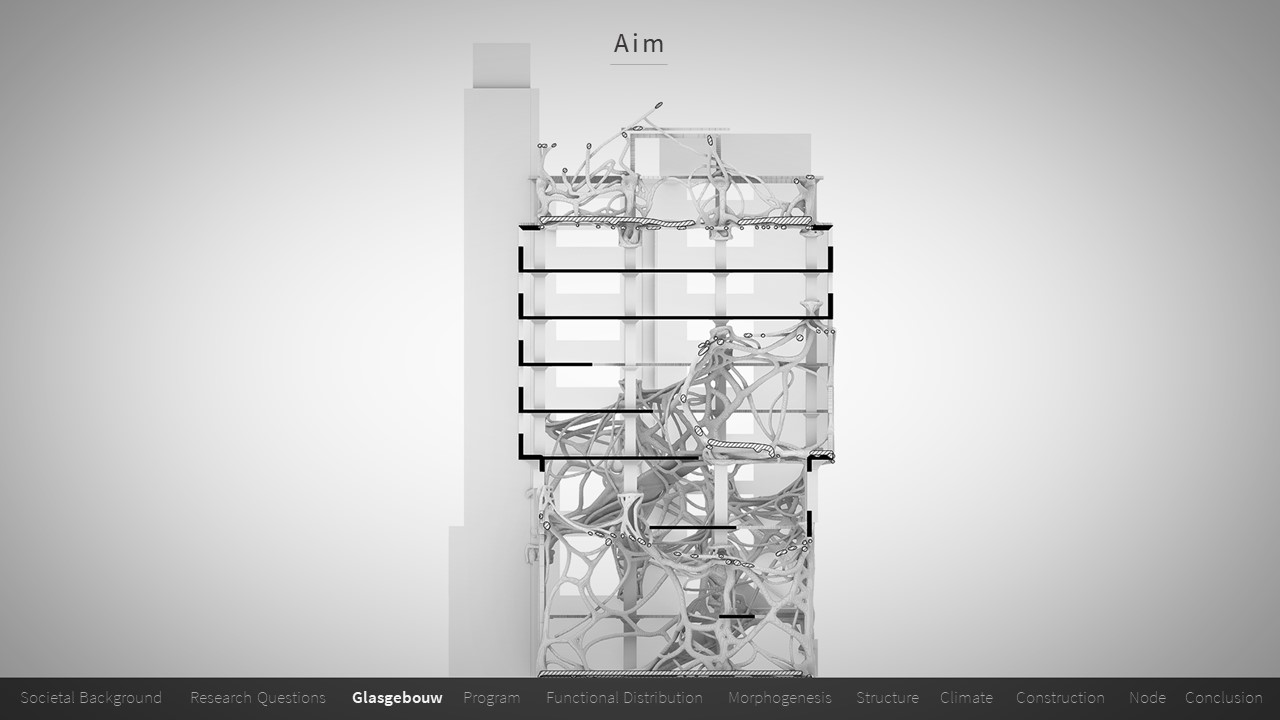
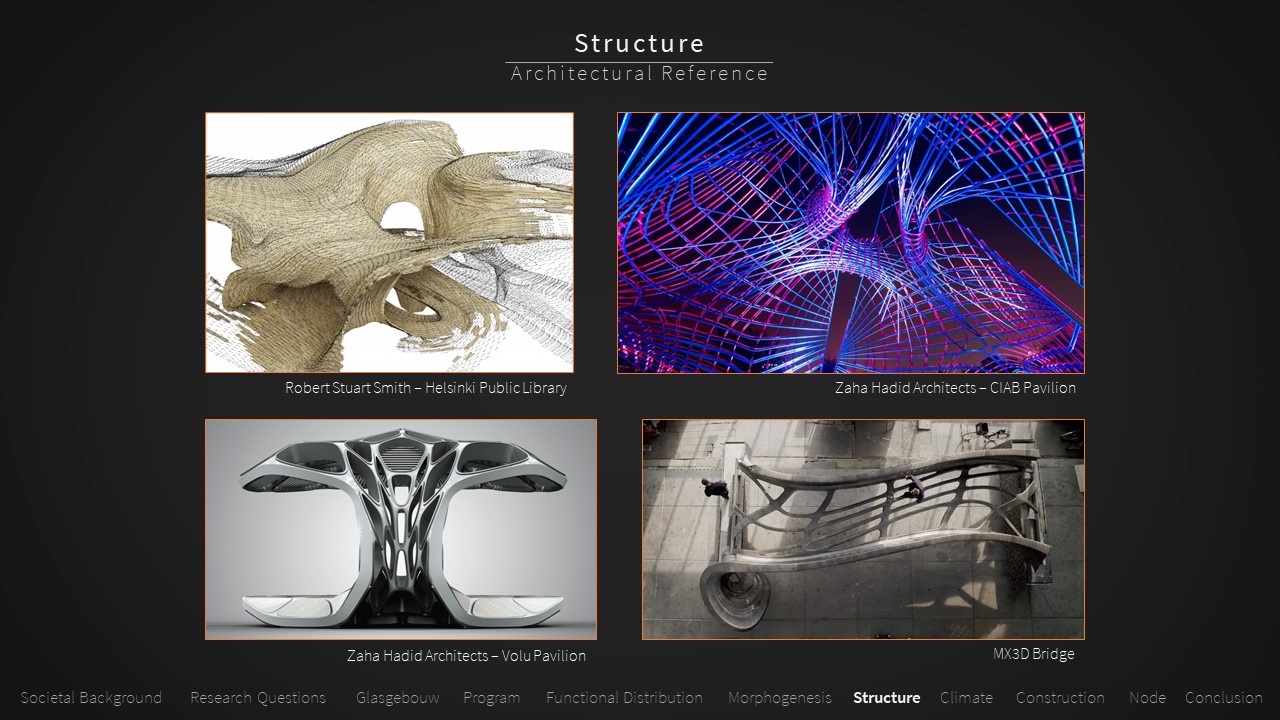
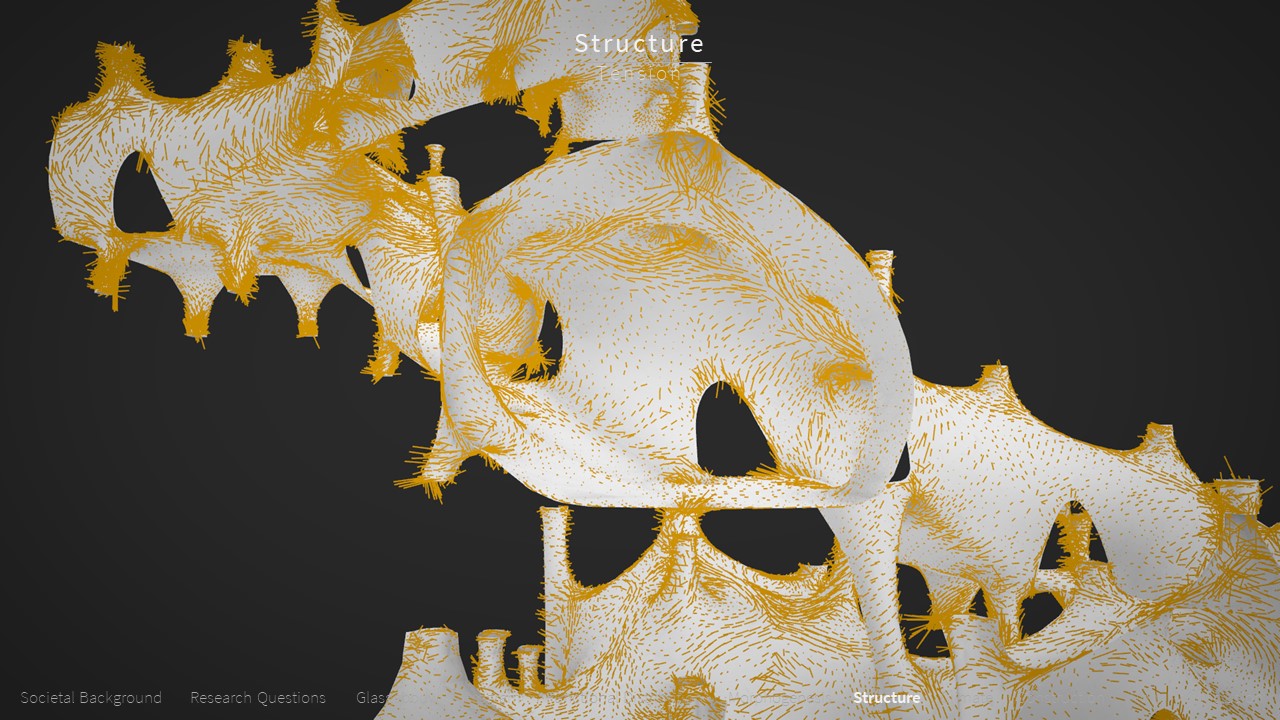
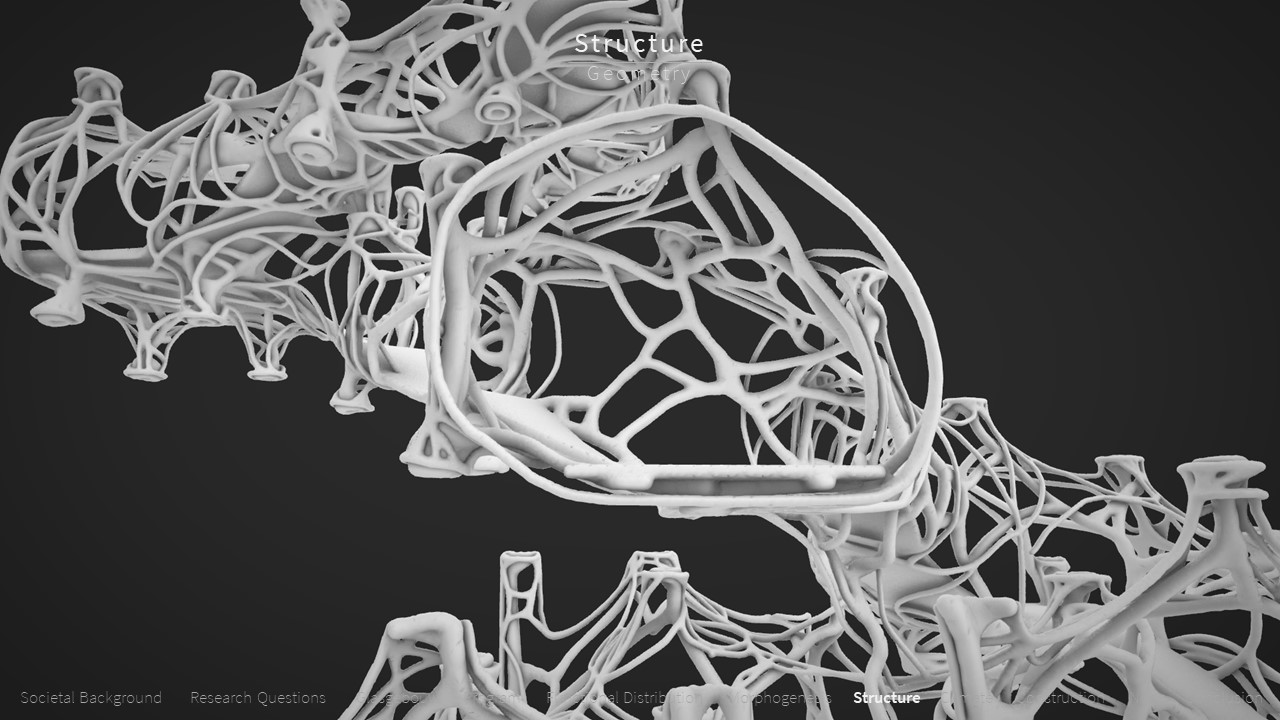
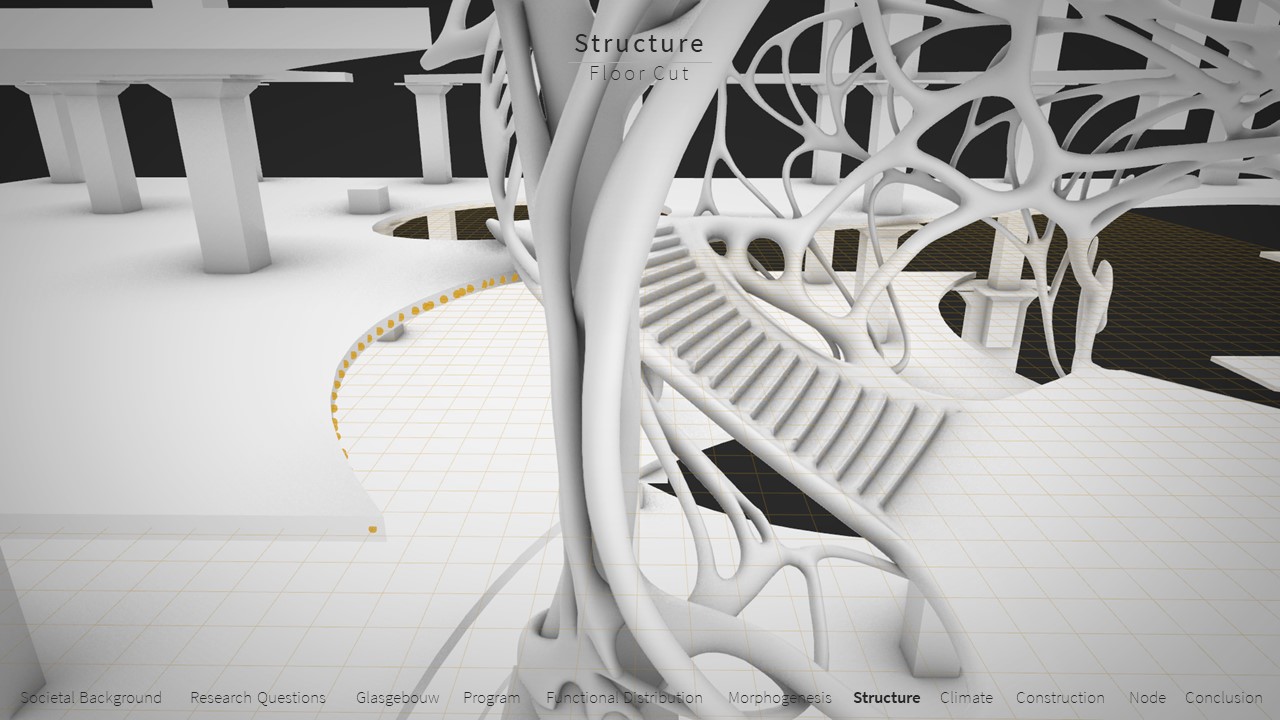
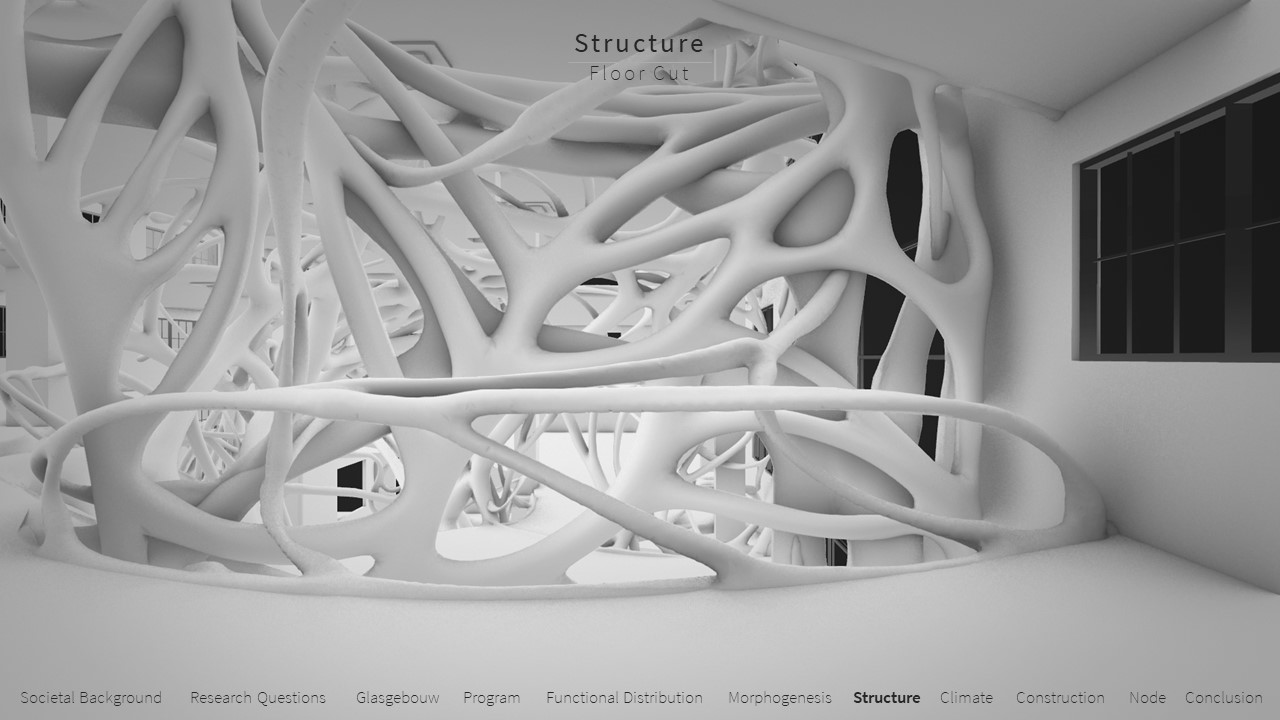
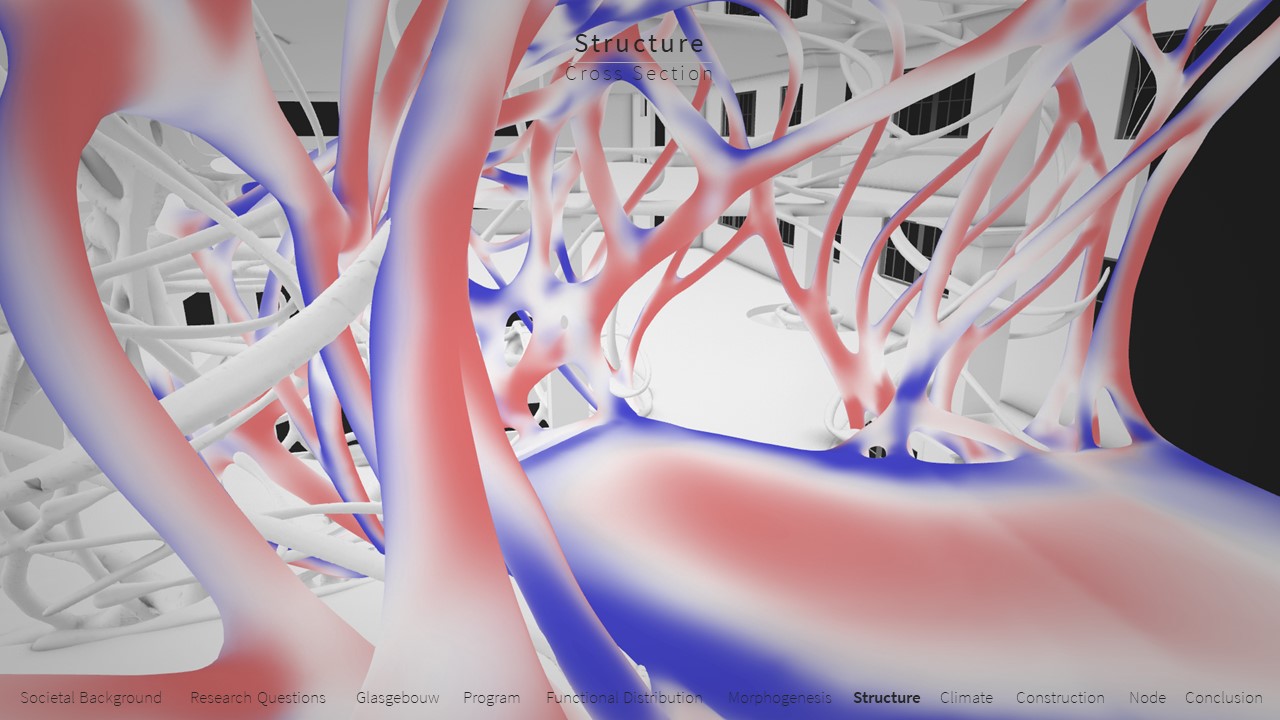
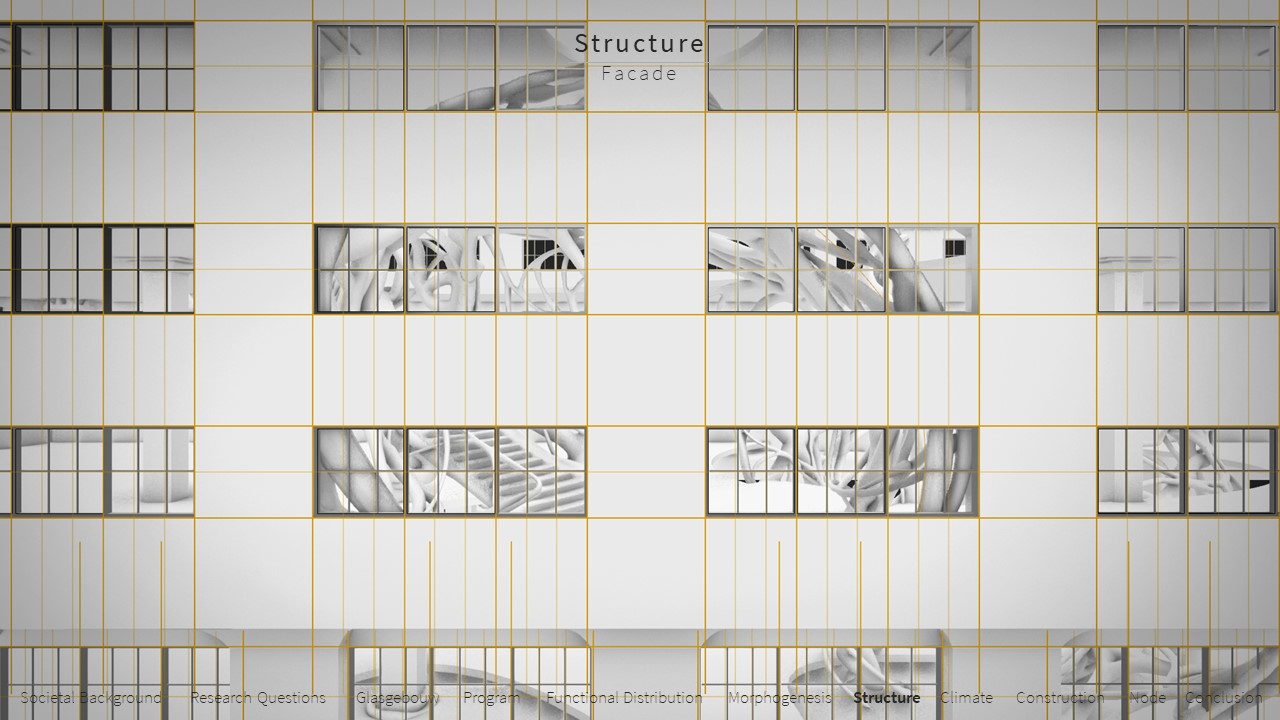
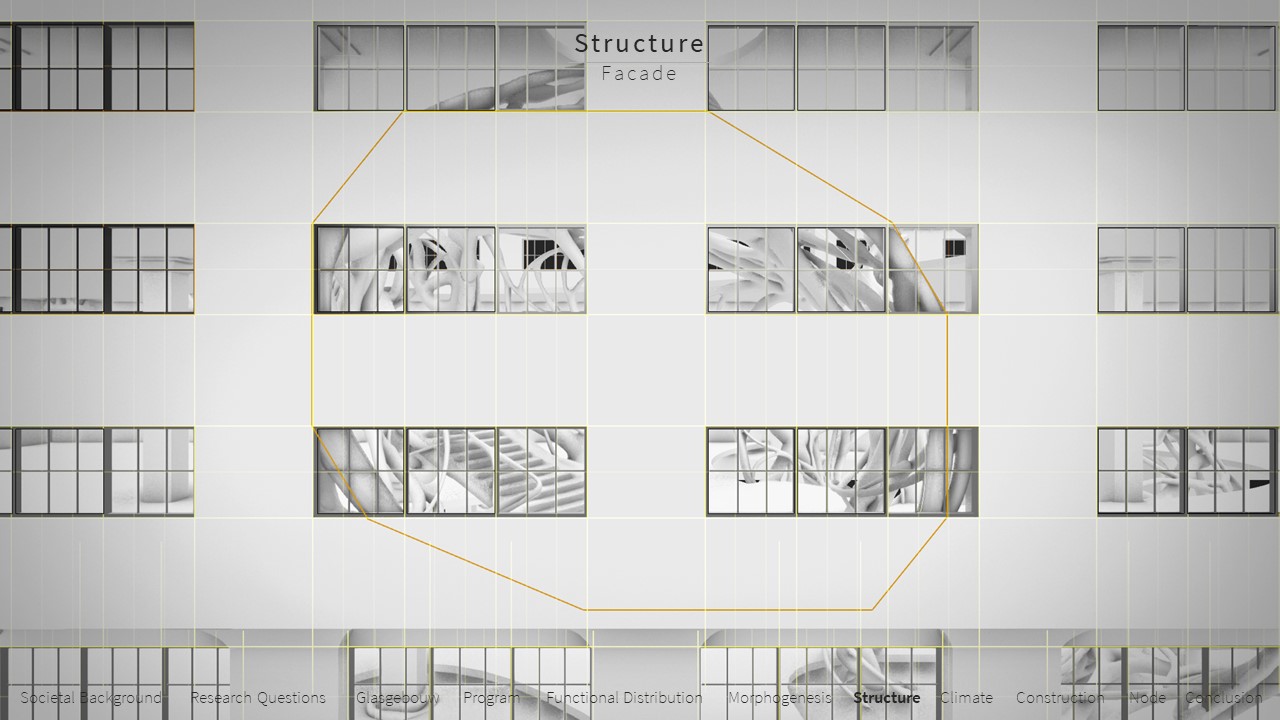
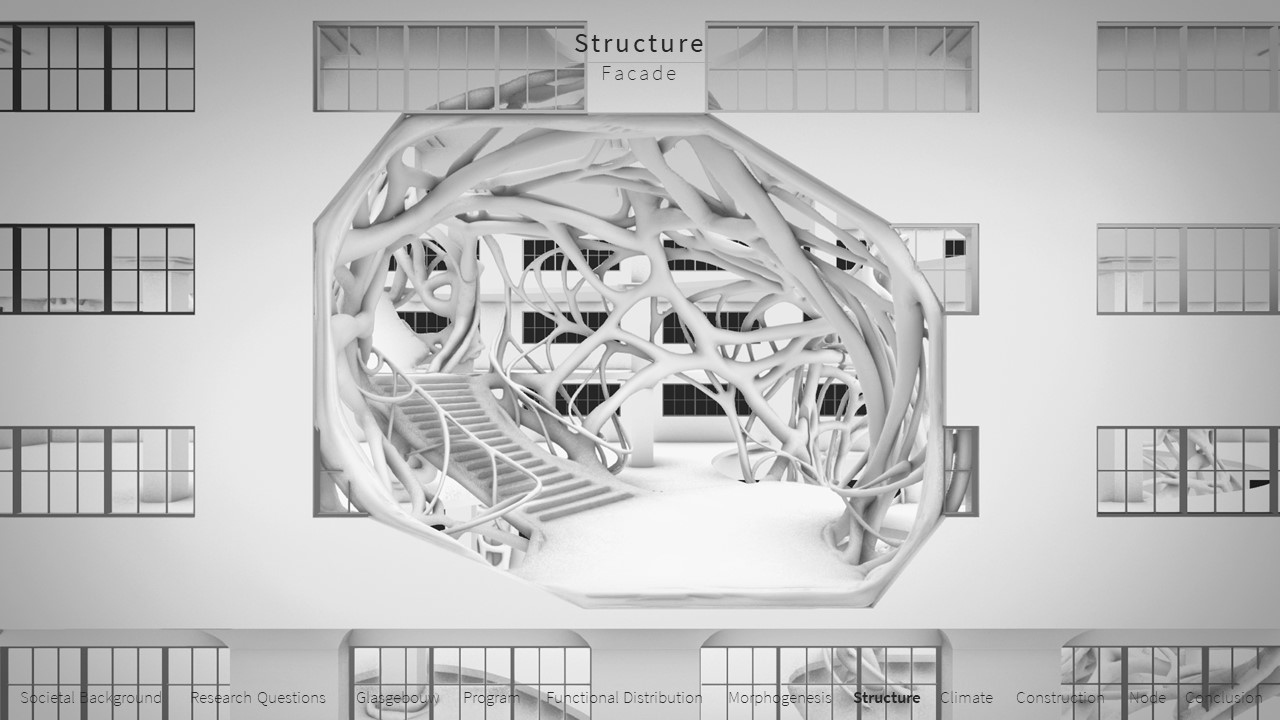
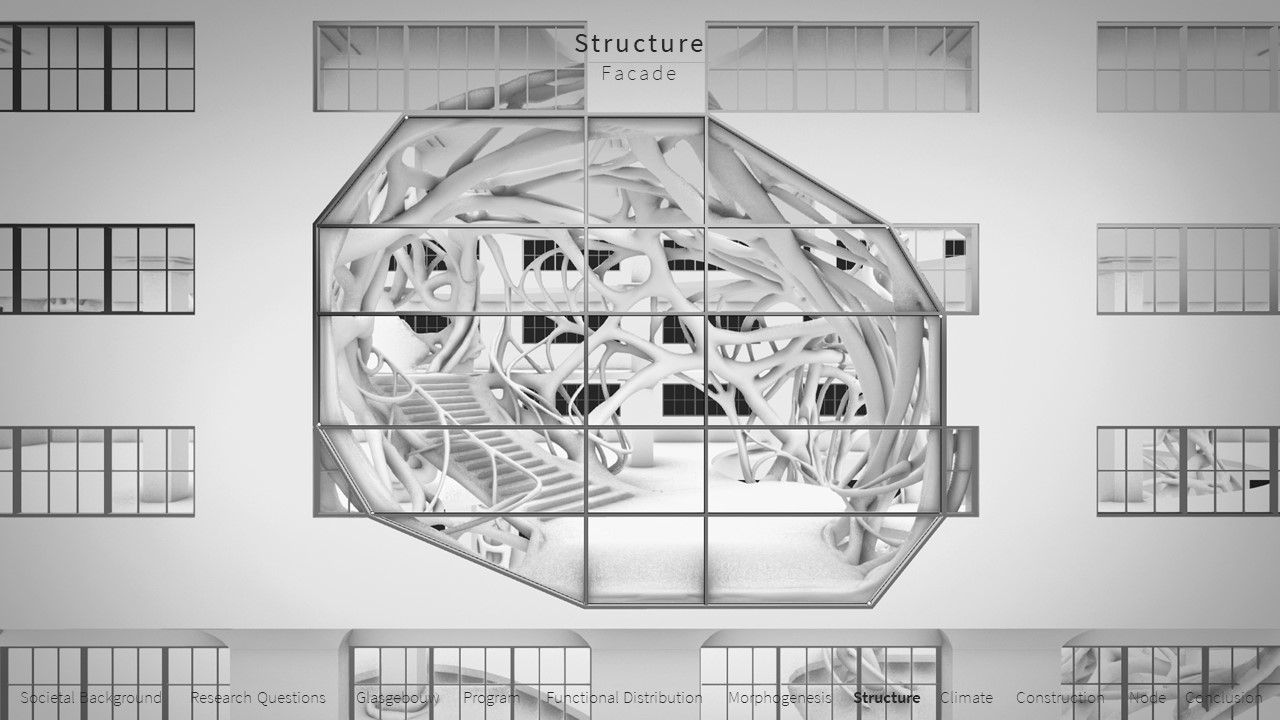
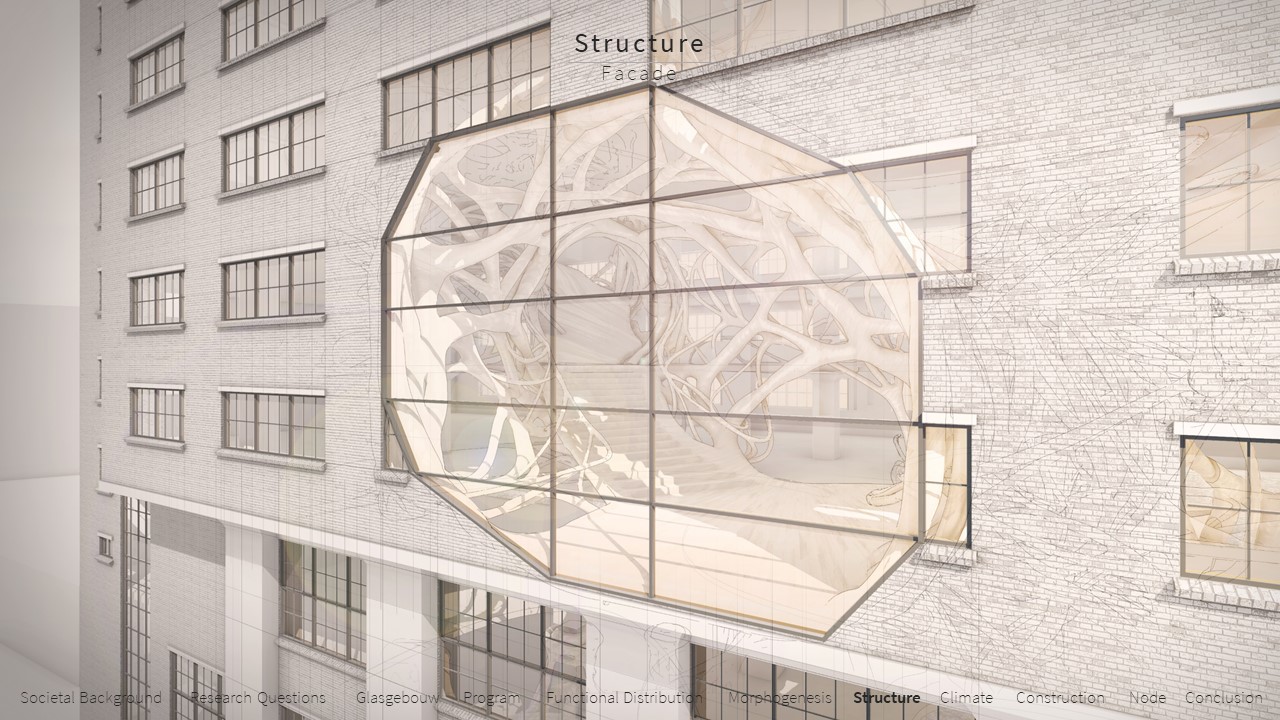
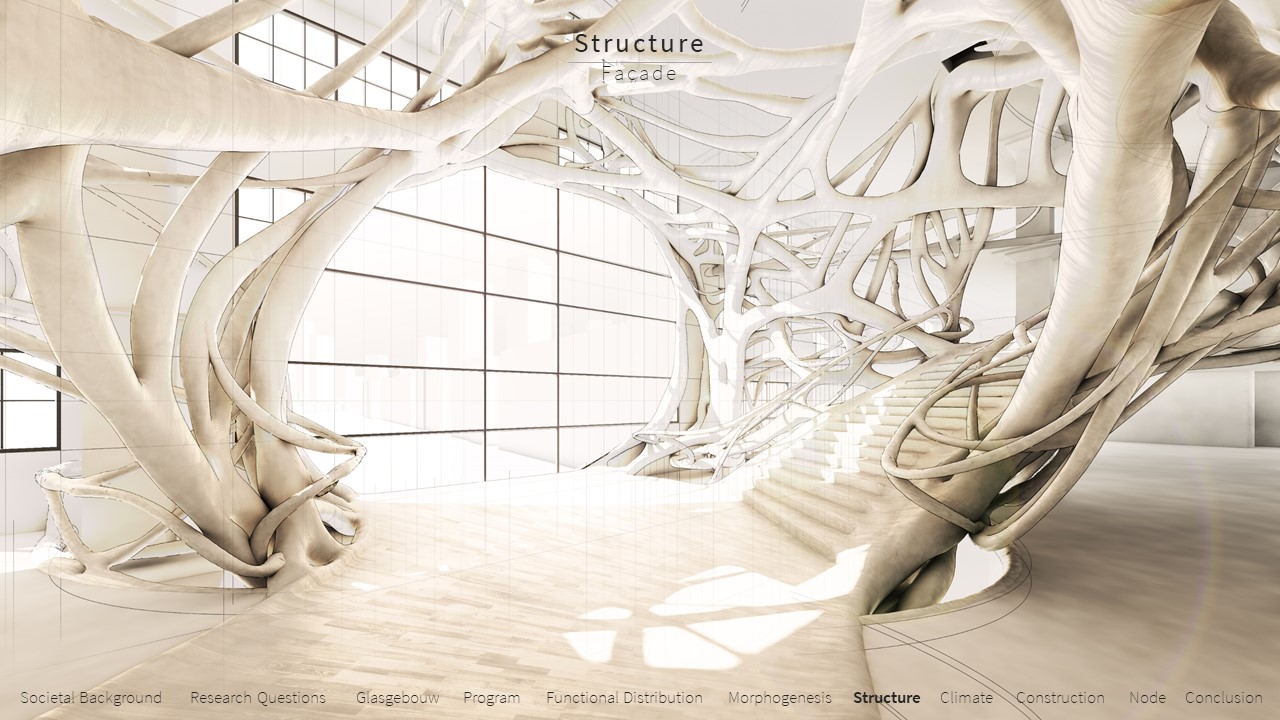
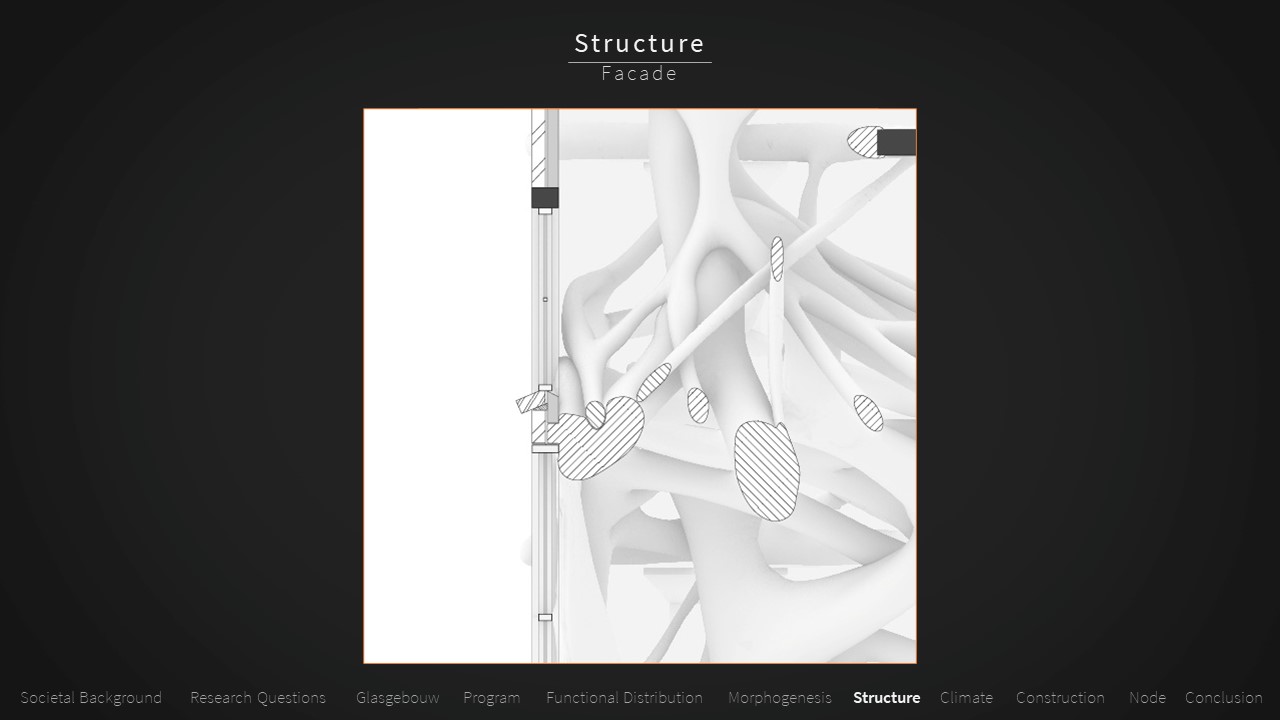
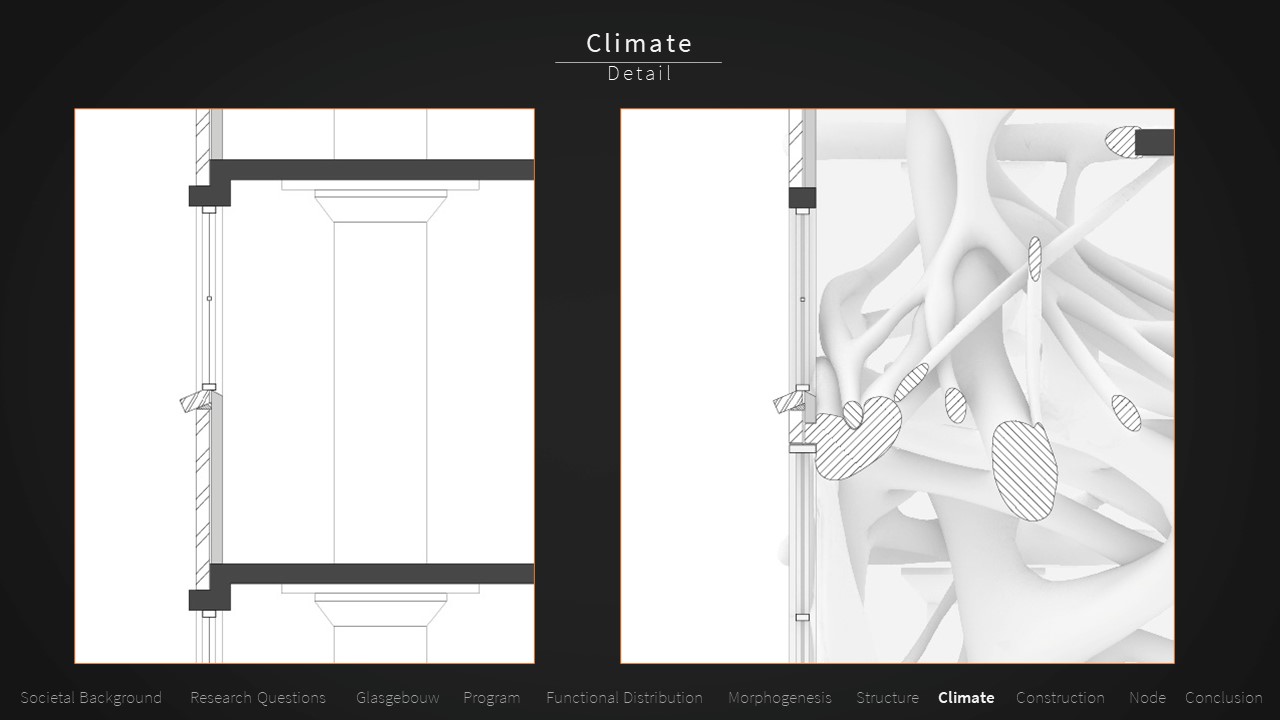
The intervention has been developed in close relation to the research. The computational tools created in the research have been used to design the structure. First a main volume was created which determines the composition of the atria as well as the structure. Structural analysis was applied to inform the composition and thickness of the beams. Consecutively, analysis of the utilization of these beams is used to inform its cross sections. Details as railing and balustrades are the design with the aim to extend the emerged architectural language.
Because of the close relation with the research in natural processes certain art-nouveau characteristics emerged in the architectural language of the intervention. However, rather than merely decorative, they are informed, performative and functional. The emerged architectural language therefore may be referred to as ‘informed art-nouveau’.
The research concludes that it’s important to acknowledge the complexity of natural processes and that they are always a part of a larger entangled system. Therefore, in order to use a natural reference in the development of computational tools it is essential to abstract an aspect that seems relevant for the project, which than needs to be translated, adjusted, and complemented in simple rules. By doing so the natural processes become merely inspirational in the architectural design. Yet they have been fundamental in the development of this project, which is evident in the emerged architectural language.
In a workshop during the project a structural node was developed. After this workshop this was continued. The steel node mutually connects the beams of the wooden structure, as well as the beams with the columns of the existing structure. The development of the node became a project on itself with the aim of prototyping 1:1 by means of 3D printing in steel. It is a project still in progress, of which the development can be followed here.
Presentation